Uncertainty-based Online Mapping and Motion Planning for Marine Robotics Guidance
Abstract
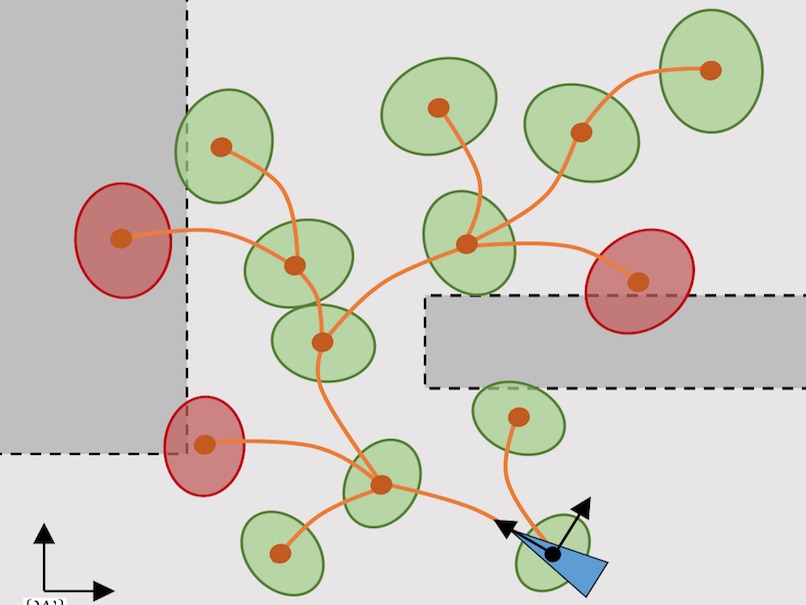
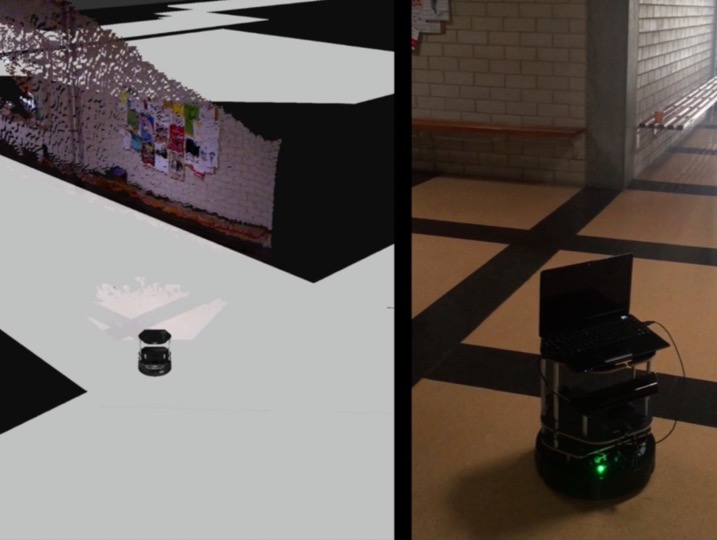
Safe autonomous navigation is an essential and challenging problem for robots operating in highly unstructured or completely unknown environments. Under these conditions, not only robotic systems must deal with limited localisation information, but also their manoeuvrability is constrained by their dynamics and often suffer from uncertainty. In order to cope with these constraints, this manuscript proposes an uncertainty-based framework for mapping and planning feasible motions online with probabilistic safety-guarantees. The proposed approach deals with the motion, probabilistic safety, and online computation constraints by: (i) incrementally mapping the surroundings to build an uncertainty-aware representation of the environment, and (ii) iteratively (re)planning trajectories to goal that are kinodynamically feasible and probabilistically safe through a multi-layered sampling-based planner in the belief space. In-depth empirical analyses illustrate some important properties of this approach, namely, (a) the multi-layered planning strategy enables rapid exploration of the high-dimensional belief space while preserving asymptotic optimality and completeness guarantees, and (b) the proposed routine for probabilistic collision checking results in tighter probability bounds in comparison to other uncertainty-aware planners in the literature. Furthermore, real-world in-water experimental evaluation on a non-holonomic torpedo-shaped autonomous underwater and simulated trials in an urban environment on an unmanned aerial vehicle demonstrate the efficacy of the method as well as its suitability for systems with limited on-board computational power.
Publications
È. Pairet, J. D. Hernández, M. Carreras, Y. Petillot, and M. Lahijanian. "Online Mapping and Motion Planning under Uncertainty for Safe Navigation in Unknown Environments", in IEEE Transactions on Automation Science and Engineering. October 2022.
È. Pairet, J. D. Hernández, M. Lahijanian, and M. Carreras. "Uncertainty-based Online Mapping and Motion Planning for Marine Robotics Guidance," in IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems. October 2018.
È. Pairet. "Uncertainty-based Online Mapping and Motion Planning for Marine Robotics Guidance," University of Girona and University of Oxford, MSc thesis. June 2017.
Learning Grasp Affordance Reasoning through Semantic Relations
Abstract
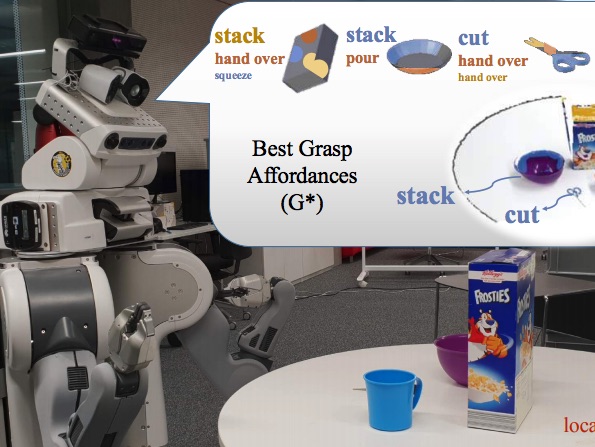
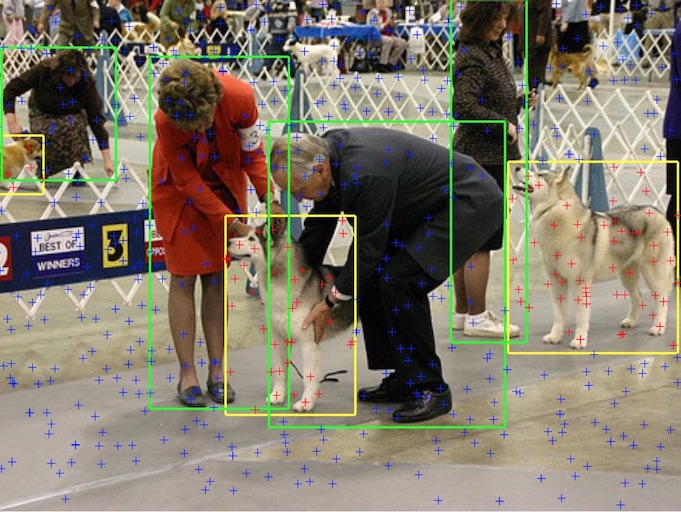
Reasoning about object affordances allows an autonomous agent to perform generalised manipulation tasks among object instances. While current approaches to grasp affordance estimation are effective, they are limited to a single hypothesis. We present an approach for detection and extraction of multiple grasp affordances on an object via visual input. We define semantics as a combination of multiple attributes, which yields benefits in terms of generalisation for grasp affordance prediction. We use Markov Logic Networks to build a knowledge base graph representation to obtain a probability distribution of grasp affordances for an object. To harvest the knowledge base, we collect and make available a novel dataset that relates different semantic attributes. We achieve reliable mappings of the predicted grasp affordances on the object by learning prototypical grasping patches from several examples. We show our method’s generalisation capabilities on grasp affordance prediction for novel instances and compare with similar methods in the literature. Moreover, using a robotic platform, on simulated and real scenarios, we evaluate the success of the grasping task when conditioned on the grasp affordance prediction.
Publications
P. Ardón, È. Pairet, K. Lohan, S. Ramamoorthy, and R. Petrick. "Affordances in Robotic Tasks - A Survey", in IEEE Transaction on Robotics. Under review.
P. Ardón, È. Pairet, R. Petrick, S. Ramamoorthy, and K. S. Lohan. "Learning Grasp Affordance Reasoning through Semantic Relations," in IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems and IEEE Robotics and Automation Letters. November 2019.
P. Ardón, È. Pairet, R. Petrick, S. Ramamoorthy, and K. S. Lohan. "Reasoning on Grasp-Action Affordances", in Conf. Towards Autonomous Robotic Systems. July 2019. Best paper award finalist.
P. Ardón, È. Pairet, S. Ramamoorthy, and K. S. Lohan. "Towards Robust Grasps, Using the Environment Semantics for Robotic Object Affordances," in AAAI Fall Symposium Series, Reasoning and Learning in Real-World Systems for Long-Term Autonomy. October 2018.
Integration of Fins on the SPARUS II AUV for its Control in Five Degrees of
Abstract
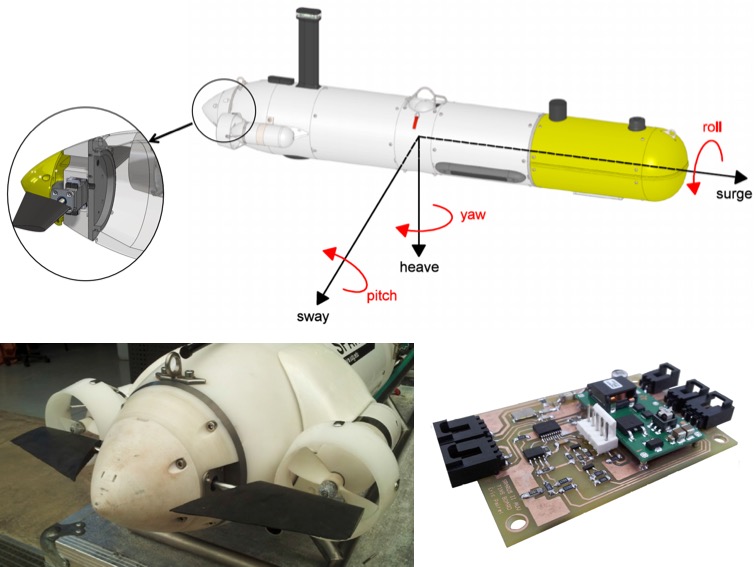
This paper describes the experience of preparing and testing the SPARUS II AUV in different applications. The AUV was designed as a lightweight vehicle combining the classical torpedo-shape features with the hovering capability. The robot has a payload area to allow the integration of different equipment depending on the application. The software architecture is based on ROS, an open framework that allows an easy integration of many devices and systems. Its flexibility, easy operation and openness makes the SPARUS II AUV a multipurpose platform that can adapt to industrial, scientific and academic applications. Five units were developed in 2014, and different teams used and adapted the platform for different applications. The paper describes some of the experiences in preparing and testing this open platform to different applications.
Publications
M. Carreras, C. Candela, D. Ribas, N. Palomeras, Ll. Magí, A. Mallios, E. Vidal, È. Pairet, and P. Ridao. "Testing SPARUS II AUV, an open platform for industrial, scientific and academic applications," in International Workshop in Marine Technology. September 2015.
È. Pairet. "Integració de timons en el robot SPARUS II pel control en cinc graus de llibertat," University of Girona, BSc thesis. Written in Catalan. September 2015.
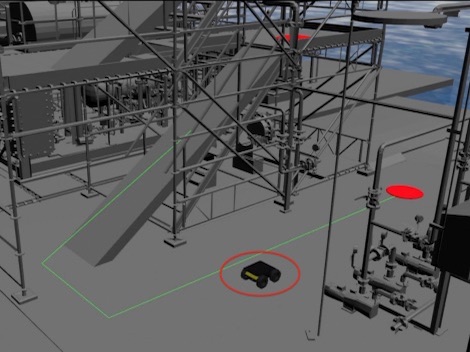
Heterogeneous multi-robot systems offer the potential to support complex missions, such as those needed for persistent autonomy in underwater domains. Such systems enable each robot to be optimised for specific tasks to better manage dynamic situations. In this context, temporal planning can generate plans to support the execution of multi-robot missions. However, the task distribution quality in the generated plans is often poor due to the strategies that existing planners employ to search for suitable actions, which do not tend to optimise task allocation. In this paper, we propose a new algorithm called the Decentralised Heterogeneous Robot Task Allocator (DHRTA) which enhances goal distribution by considering task spatial distribution, execution time, and the capabilities of the available robots. DHRTA is the first phase of our decentralised planning strategy which supports individual robot plan generation using temporal planners. Experiments illustrate the robustness of the approach and indicate improvements in plan quality by reducing the planning time, mission time and the rate of mission failures.
Publications
Y. Carreno, È. Pairet, Y. Petillot, and R. Petrick. "A Decentralised Strategy for Heterogeneous AUV Missions via Goal Distribution and Temporal Planning", in Intl. Conf. on Automated Planning and Scheduling. To be presented.
Y. Carreno, È. Pairet, Y. Petillot, and R. Petrick. "Task Allocation Strategy for Heterogeneous Robot Teams in Offshore Missions", in Intl. Conf. on Autonomous Agents and Multiagent Systems. To be presented.
È. Pairet, P. Ardón, X. Liu, J. Lopes, H. Hastie, and K. S. Lohan. "A Digital Twin for Human-Robot Interaction", in ACM/IEEE Intl. Conf. on Human-Robot Interaction. March 2019.
Learning Generalisable Manipulation Planning and Obstacle Avoidance Skills
Abstract
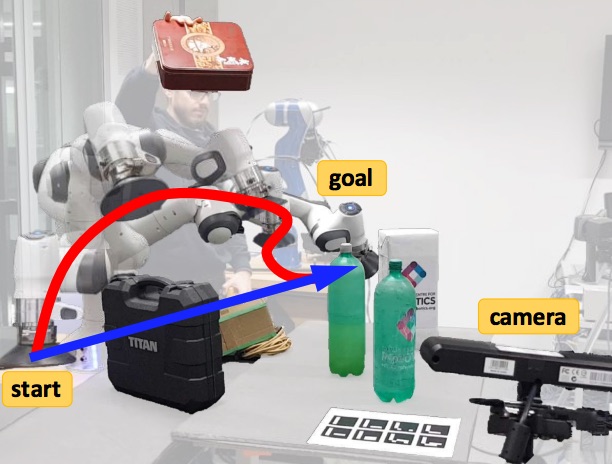
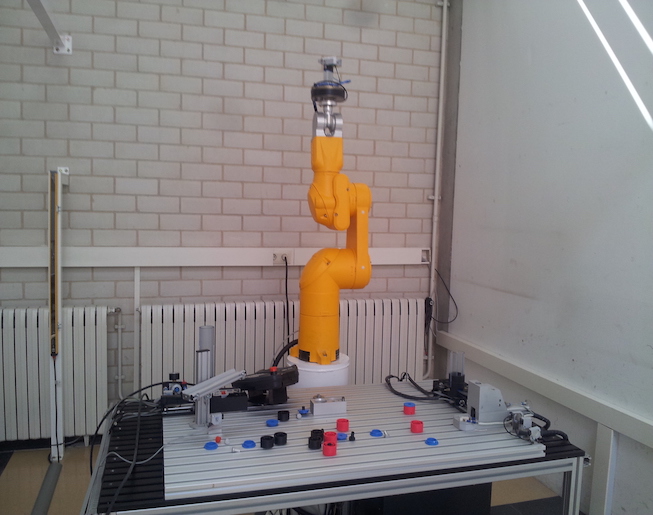
Unforeseen events are frequent in the real-world environments where robots are expected to assist, raising the need for fast replanning of the policy in execution to guarantee the system and environment safety. Inspired by human behavioural studies of obstacle avoidance and route selection, this paper presents a hierarchical framework which generates reactive yet bounded obstacle avoidance behaviours through a multi-layered analysis. The framework leverages the strengths of learning techniques and the versatility of dynamic movement primitives to efficiently unify perception, decision, and action levels via low-dimensional geometric descriptors of the environment. Experimental evaluation on synthetic envi- ronments and a real anthropomorphic manipulator proves that the robustness and generalisation capabilities of the proposed approach regardless of the obstacle avoidance scenario makes it suitable for robotic systems in real-world environments.
Publications
È. Pairet, P. Ardón, M. Mistry, and Y. Petillot. "Learning Generalisable Coupling Terms for Obstacle Avoidance via Low-dimensional Geometric Descriptors," in IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems and IEEE Robotics and Automation Letters. November 2019.
È. Pairet, P. Ardón, M. Mistry, and Y. Petillot. "Learning and Composing Primitive Skills for Dual-arm Manipulation", in Conf. Towards Autonomous Robotic Systems. July 2019. Advanced Robotics at Queen Mary (ARQ) best paper award.
È. Pairet, P. Ardón, F. Broz, M. Mistry, and Y. Petillot. "Learning and Generalisation of Primitives Skills Towards Robust Dual-arm Manipulation," in AAAI Fall Symposium Series, Reasoning and Learning in Real-World Systems for Long-Term Autonomy. October 2018.
È. Pairet. "Learning and Generalisation of Primitive Skills for Robust Dual-arm Manipulation," University of Ediburgh and Heriot-Watt University, MSc thesis. August 2018.
J. D. Hernández, G. Vallicrosa, E. Vidal, È. Pairet, M. Carreras, and P. Ridao. "On-line 3D Path Planning for Close-proximity Surveying with AUVs," in IFAC Workshop on Navigation, Guidance and Control of Underwater Vehicles. April 2015.
J. D. Hernández, E. Vidal, G. Vallicrosa, È. Pairet, and M. Carreras. "Simultaneous Mapping and Planning for Autonomous Underwater Vehicles in Unknown Environments," in MTS/IEEE OCEANS. October 2015.